舰防炮介绍
Update history
| Date | Version | Author | Update content |
|---|---|---|---|
| 2025-06-27 | 1.0.2 | 老怪鸽 | 更新了PID和滤波章节 |
| 2024-12-05 | 1.0.1 | 老怪鸽 | 更新了基本文档 |
项目背景
项目参考来源:
【给玩具枪加装云台和人脸识别功能,实现目标自动识别锁定功能】
原作者是采用的 opencv 作为识别方案,而 opencv 需要运行在电脑的操作系统上,不是很方便。而最近正好看到立创开发板的 K230-AI 开发板在找内测,有幸联系到并且参与其中。
将决定以 K230 为主要核心,控制二维舵机云台作为运动装置、板载摄像头识别物品功能作为瞄准装置、电动玩具枪作为发射装置等,以实现自动追踪炮台的功能。
硬件设计
硬件准备
二维舵机云台

地址:https://item.taobao.com/item.htm?_u=l2t4uge5db1c&id=560120308139电动玩具枪

地址:https://item.taobao.com/item.htm?_u=l2t4uge530d9&id=684699922229K230-AI识别开发板

地址:https://lckfb.com/project/detail/lckfb-lspi-k230-1g-canmv?param=baseInfo辅助工具
螺丝批套装、热胶枪、杜邦线等。
硬件连接
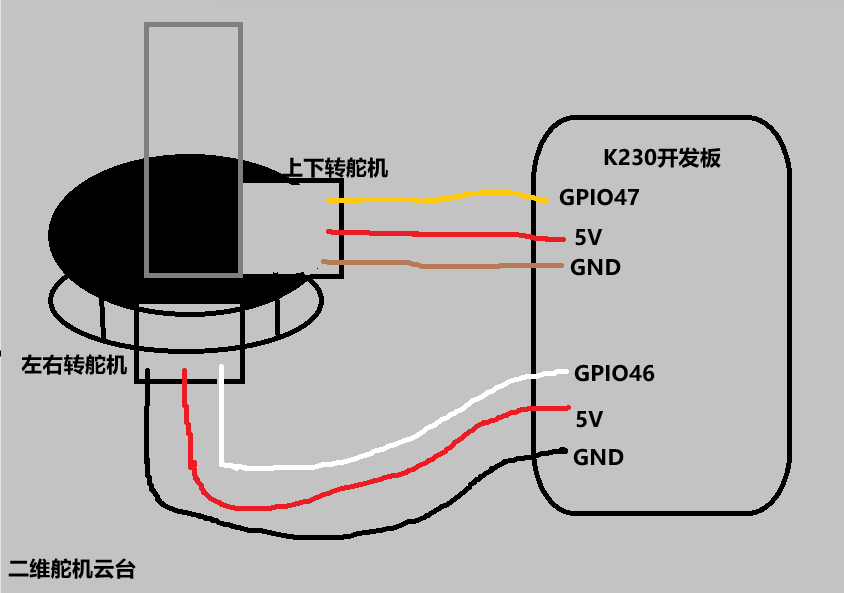
电动玩具枪也是可以通过开关控制的,只需要通过继电器的方式,连接到GPIO上是可以控制开枪的,这里我因为没有买继电器所以我就先不画。
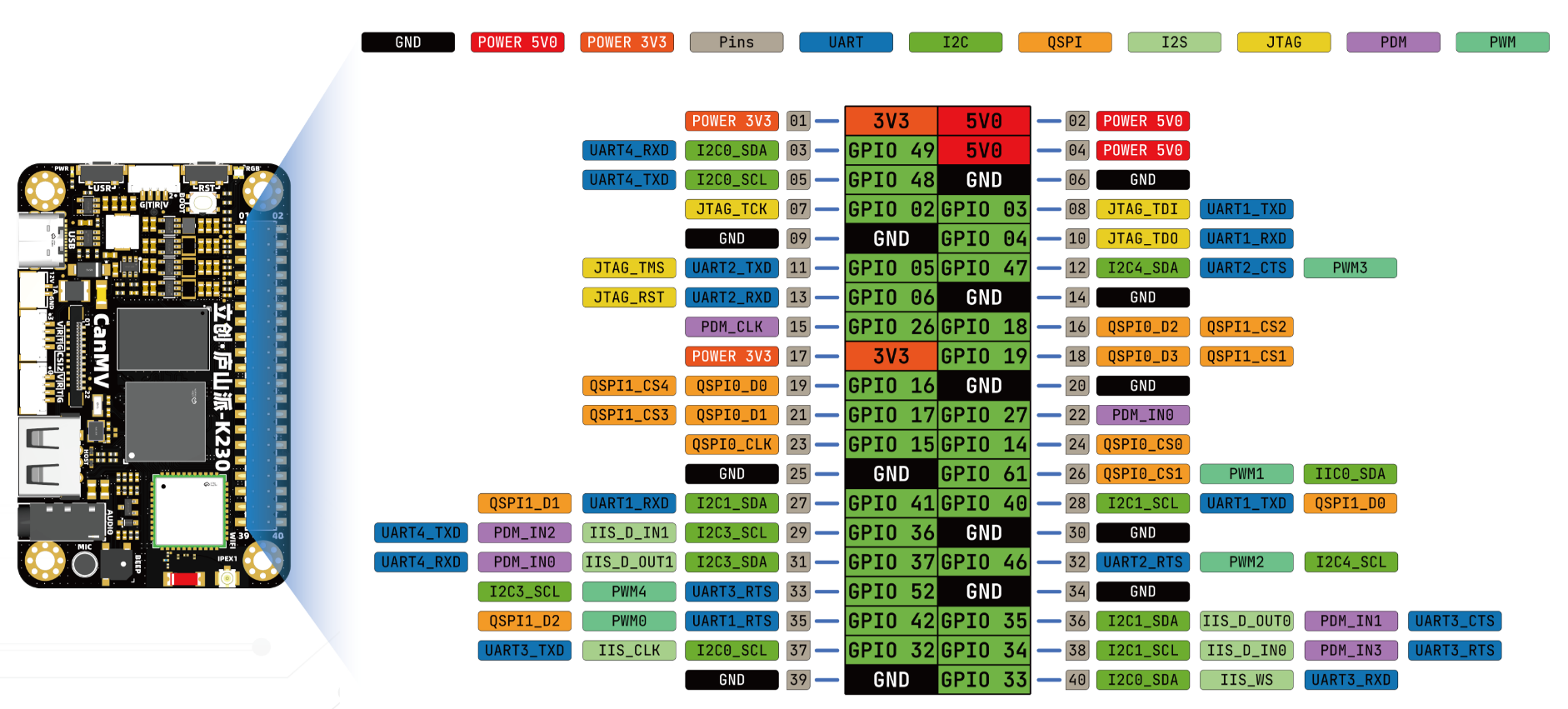
K230排针接口示意图,点击展开
软件设计
K230的快速入门请参考:https://wiki.lckfb.com/zh-hans/lushan-pi-k230/quick-start.html
请按照上面的链接,完成开发板的组装、CanMV 固件烧录、电脑连接等操作。我在后面将不会介绍什么是 IDE ,以及如何连接。
IDE显示图像
显示图像在K230的固件中一共支持4种,分别是 HDMI 的 VGA , HDMI 的 1080P 、LCD、IDE 等。我们先了解怎么将摄像头采集到的画面显示在 IDE 的图像缓冲区。
根据 K230 资料的Sensor例程讲解 ,提取出 摄像头的初始化 + 采集图像的代码。
# Camera 示例
import time
import os
import sys
from media.sensor import *
from media.display import *
from media.media import *
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
sensor = None
try:
# 配置摄像头的图像大小
sensor = Sensor(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 摄像头传感器复位
sensor.reset()
# 设置图像是否镜像
# sensor.set_hmirror(False)
# 设置图像是否翻转
# sensor.set_vflip(False)
# 设置通道0的图像输出尺寸
sensor.set_framesize(width = DETECT_WIDTH, height = DETECT_HEIGHT)
#设置通道0输出格式为RGB565(彩色图像)
sensor.set_pixformat(Sensor.RGB565)
# Init媒体管理器
MediaManager.init()
# 传感器启动运行
sensor.run()
while True:
sensor.snapshot() #获取一帧图像
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception '{e}'")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
根据Display例程讲解,提取出将图像显示到 IDE 上的代码。
import time, os, gc, sys, math
from media.sensor import *
from media.display import *
from media.media import *
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
try:
#配置图像显示方式为IDE显示,显示的宽高为DETECT_WIDTH+DETECT_HEIGHT,帧率100fps
Display.init(Display.VIRT, width = DETECT_WIDTH, height = DETECT_HEIGHT, fps = 100)
while True:
Display.show_image(img) #显示一个图像,这个img是摄像头采集的一帧图像
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception '{e}'")
finally:
# 清除显示缓存
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
将这两个代码一整合,就得到了将图像显示到 IDE 中的代码:
import time
import os
import sys
from media.sensor import *
from media.display import *
from media.media import *
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
sensor = None
try:
# 配置摄像头的图像大小
sensor = Sensor(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 摄像头传感器复位
sensor.reset()
# 设置图像是否镜像
# sensor.set_hmirror(False)
# 设置图像是否翻转
# sensor.set_vflip(False)
# 设置通道0的图像输出尺寸
sensor.set_framesize(width = DETECT_WIDTH, height = DETECT_HEIGHT)
#设置通道0输出格式为RGB565(彩色图像)
sensor.set_pixformat(Sensor.RGB565)
#配置图像显示方式为IDE显示,显示的宽高为DETECT_WIDTH+DETECT_HEIGHT,帧率100fps
Display.init(Display.VIRT, width = DETECT_WIDTH, height = DETECT_HEIGHT, fps = 100)
# Init媒体管理器
MediaManager.init()
# 传感器启动运行
sensor.run()
while True:
img = sensor.snapshot() #获取一帧图像
Display.show_image(img) #显示摄像头采集的图像
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception '{e}'")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
大家可以运行上面的例程看看,在 CanMV IDE 中会不会显示出K230开发板摄像头的画面。
颜色识别
K230是一个AI视觉芯片,根据官网资料可以知道,其可以通过摄像头识别出很多东西,比如人脸、形状、颜色、物品、水果等等,这里我比较熟练使用的是颜色识别,就先以颜色识别为例,获取指定颜色的目标方位。
而我们能够获取颜色的方位,那就可以根据官方例程推举出识别其他东西时,怎么获取对应识别目标的方位了。
根据 canMV-K230 IDE 自带的颜色识别例程,整理出关键的代码。
以下是颜色识别例程:
# Find Blobs Example
#
# This example shows off how to find blobs in the image.
import time, os, gc, sys
from media.sensor import *
from media.display import *
from media.media import *
DETECT_WIDTH = ALIGN_UP(320, 16)
DETECT_HEIGHT = 240
sensor = None
def camera_init():
global sensor
# construct a Sensor object with default configure
sensor = Sensor(width=DETECT_WIDTH,height=DETECT_HEIGHT)
# sensor reset
sensor.reset()
# set hmirror
# sensor.set_hmirror(False)
# sensor vflip
# sensor.set_vflip(False)
# set chn0 output size
sensor.set_framesize(width=DETECT_WIDTH,height=DETECT_HEIGHT)
# set chn0 output format
sensor.set_pixformat(Sensor.RGB565)
# use IDE as display output
Display.init(Display.VIRT, width= DETECT_WIDTH, height = DETECT_HEIGHT,fps=100,to_ide = True)
# init media manager
MediaManager.init()
# sensor start run
sensor.run()
def camera_deinit():
global sensor
# sensor stop run
sensor.stop()
# deinit display
Display.deinit()
# sleep
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# release media buffer
MediaManager.deinit()
def capture_picture():
fps = time.clock()
while True:
fps.tick()
try:
os.exitpoint()
global sensor
img = sensor.snapshot()#获取图像
# 设置颜色阈值
thresholds = [[0, 80, 40, 80, 10, 80]] # 红色的阈值,这样代码就只识别红色
# 从图像中查找颜色,根据阈值进行对比,当阈值一致时,将对应颜色的各个参数/位置等保存到blobs变量中
blobs=img.find_blobs(thresholds ,pixels_threshold= 500)
# 从blobs中遍历各个被识别到的阈值一样的颜色,将遍历到的颜色参数赋值给blob
for blob in blobs:
# 调用画矩形API,填入遍历到的颜色4个角的位置,设置矩形框的颜色为RGB的RG全色
img.draw_rectangle(blob[0], blob[1], blob[2], blob[3], color = (255, 255, 0))
# 显示图像
Display.show_image(img)
img = None
gc.collect()
print(fps.fps()) #输出帧率
except KeyboardInterrupt as e:
print("user stop: ", e)
break
except BaseException as e:
print(f"Exception {e}")
break
def main():
os.exitpoint(os.EXITPOINT_ENABLE)
camera_is_init = False
try:
print("camera init")
camera_init()
camera_is_init = True
print("camera capture")
capture_picture()
except Exception as e:
print(f"Exception {e}")
finally:
if camera_is_init:
print("camera deinit")
camera_deinit()
if __name__ == "__main__":
main()
分析:
其实主要就是 find_blobs API,它会去图像中查找我们设置的阈值的颜色,找到 一个就记录起来成为一个对象,找到一个就记一个,然后我们就可以对该颜色对象为所欲为了。
但是这个例程还是有一点问题,也不能说是问题,只是不符合我们的要求,我们的要求是只识别一个颜色。毕竟我们只有一个炮台,识别再多个也只能打一个。那么问题来了,这个例程是会将图像中识别到的颜色都画框并记录,类似以下现象:(识别浅蓝色)

图中的白色矩形框+白色十字就是表示的识别到的颜色。现在识别出了那么多个目标,我们只有一个炮口怎么办?我们可以优先找到最大的,最近的一个开炮!而在图像的世界里,在多个目标中,像素越多的,说明离摄像头越近!那就是最大的目标!
以下是在一堆识别到的图像中,找到最大像素的图像代码:(只写关键的了)
# 拍摄一张图片
img = sensor.snapshot()
# 查找图像中满足红色阈值(red_threshold)的区域
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200, merge=True)
# 如果找到了至少一个blob
if blobs:
# 从blobs中找到最大像素点的blob
largest_blob = max(blobs, key=lambda b: b.pixels())
# 只对最大像素点的目标画框,框的颜色是RGB中的R(红色)
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 将位置和宽高格式化为字符串
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
# 图像上显示位置和宽高信息的字符串,字符的大小是32
img.draw_string_advanced(0,0,32,wz)
上面代码中的阈值注释虽然是红色阈值,但是我实际上用的是绿色的阈值
现在我们就已经完成了目标定位的任务了,上面的代码中找到了最大像素的目标,并且输出它对于摄像头图像大小的X轴Y轴位置。
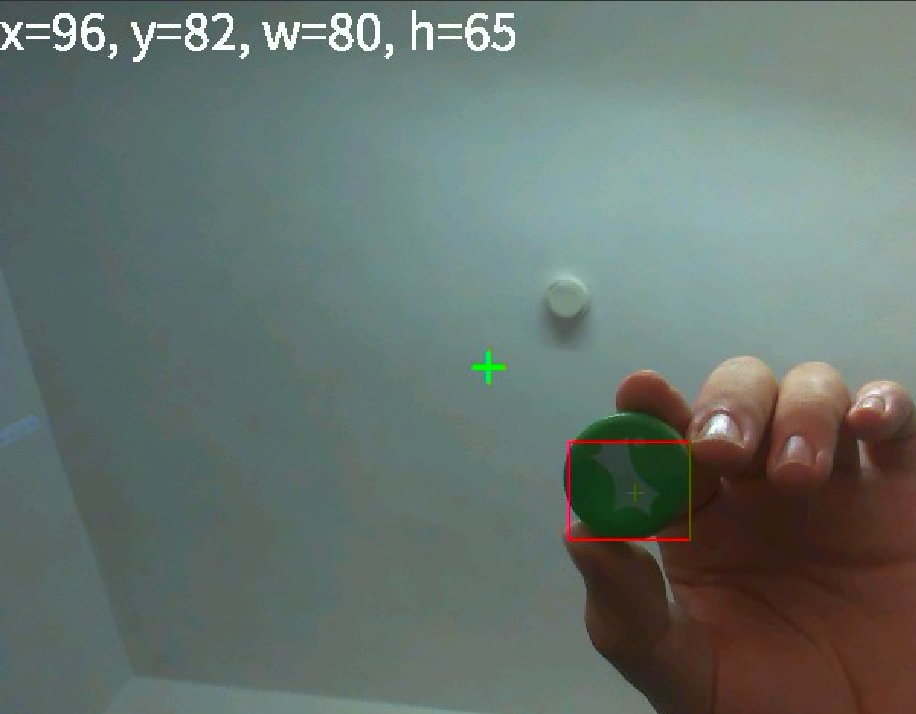
我还加了一些辅助内容,比如给图像的中心画一个绿色的十字。其他内容具体看源码 main.py。
舵机控制
舵机控制的基本原理,参考该博主的文章:舵机篇(一)舵机原理
舵机控制简单来说,就是输入一个20ms周期的PWM给他,通过调整高电平占空比实现舵机的旋转。
频率等于周期的倒数,所以
20ms周期 =1 / 20=50 Hz频率
在庐山派K230开发板引出的PWM中,PWM只有5个,分别是PWM0~PWM4。只有特定的引脚支持PWM功能,具体见下图:
在我们的舵机案例中,使用的是 GPIO46 、 GPIO47 上的,PWM2 和 PWM3。
在代码中初始化PWM参数如果下:
配置方法具体说明,请参考立创开发板wiki:庐山派开发板资料-PWM
from machine import PWM, FPIOA, Pin
# 配置排针引脚号12,芯片引脚号为47的排针复用为PWM通道3输出
pwm_io1 = FPIOA()
pwm_io1.set_function(47, FPIOA.PWM3)
# 初始化PWM参数
pwm_ud = PWM(3, 50, 50, enable=True) # 默认频率50Hz,占空比50% 3~12
# 配置排针引脚号32,芯片引脚号为46的排针复用为PWM通道2输出
pwm_io2 = FPIOA()
pwm_io2.set_function(46, FPIOA.PWM2)
# 初始化PWM参数
pwm_lr = PWM(2, 50, 50, enable=True) # 默认频率50Hz,占空比50% 2~13
pwm_lr.duty(7.5) #旋转到中间
pwm_ud.duty(7.7) #旋转到中间
在案例中,我将左右旋转的舵机命名为 pwm_lr ,上下旋转的舵机命名为 pwm_ud 。
在上面的案例中还有一个地方需要说明,我为了让舵机一上电就默认旋转到中间,设置了两个舵机动作:
pwm_lr.duty(7.5) #旋转到中间
pwm_ud.duty(7.7) #旋转到中间
这里的 7.5 指的是占空比的百分比,即7.5%的高电平占空比。我们来求一下,为什么7.5是中间。我们现在知道了以下参数:
- PWM周期为
20 ms - PWM频率为
50 Hz - 高电平的占空比为
7.5%
求我们当前旋转的角度。
根据180度旋转的舵机控制原理,可以知道舵机旋转角度和周期的关系如下图:
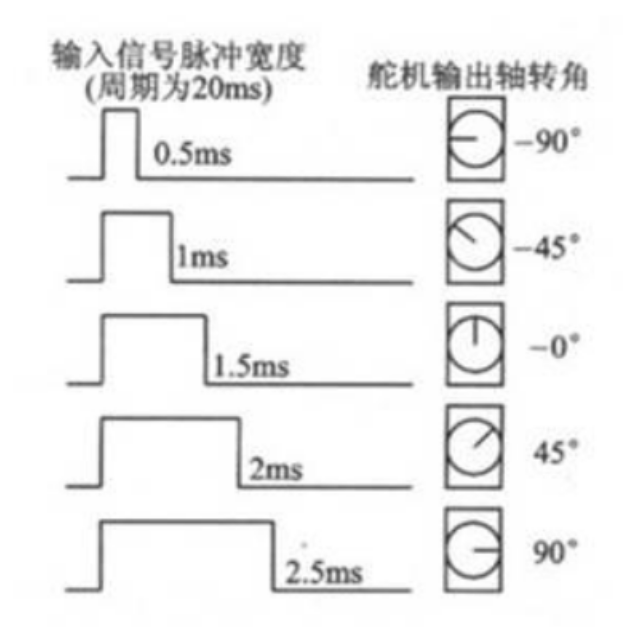
我们只要控制在20ms的周期内的高电平时间,就可以控制舵机的旋转角度。
那么获取高电平时间公式如下:
参照之前的参数 带入得到:
高电平的时间是 1.5 毫秒 。
而 1.5 ms 就是控制舵机旋转到0度。所以代码中设置 7.5% 的占空比就是让舵机旋转到中间(舵机最左是-90度,中间是0度,最右是90度)。
而上下旋转的舵机占空比,我设置为了7.7%,这个是我的测试值,测试出来的舵机旋转比较接近中间的值,大家自行测试。
现在180度的舵机,我们将其分成为 -90~90度 的范围。我们还要知道3个参数:
最大角度
90度时我们要设置多少占空比;最小角度
-90度时我们要设置多少占空比;中间角度
0度时我们要设置多少占空比;
经过我自己实测,上下动作的舵机占空比范围是 2.5~12.5% 的占空比,2.5%占空比时角度最小,12.5% 占空比时角度最大,7.5% 占空比时角度居中。
为什么不直接用理论值计算?而是要手动测试呢?
这个是因为舵机云台结构的原因,比如上下旋转的舵机我们设置旋转为了0度,但是因为结构上的原因,舵机转不到0度,它被结构框体卡死了,这个就是赌死现象:没有转到0度,舵机就一直转。
为了防止堵死的现象出现,就需要我们手动测试一个安全的旋转范围。
这里以Y轴举例(Y轴就是上下旋转的舵机),现在Y轴的范围在摄像头采集的图像中是 0 ~ 479 个像素,屏幕的中心值就是 480/2=240 ,而Y轴的范围是从 0 开始的,所以我们得减一,屏幕的中心值就是 239 。我们以屏幕中心为参考,
当Y轴的值小于239时,我们就判断识别物体是上方;
当Y轴的值大于239时,我们就判断识别物体是下方;
当Y轴的值等于239时,我们就判断识别的物体是Y轴中心;
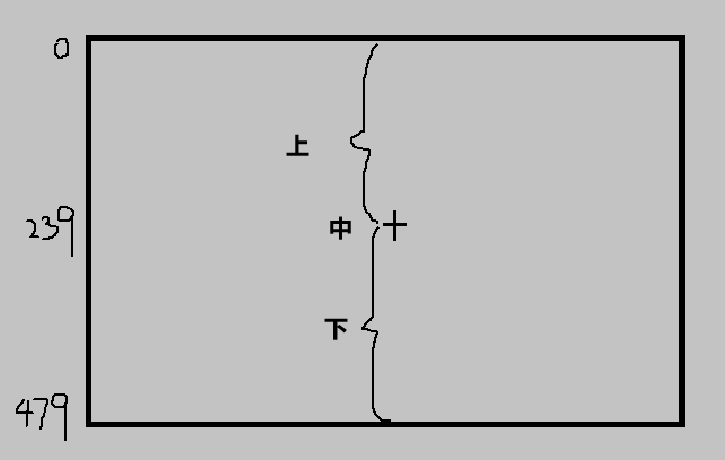
我个人觉得全部是正数的范围,不方便我们去处理舵机,0 ~ 238是上方,239是中间,240 ~ 379是下方,这样不好带入到我们后面的舵机控制中。为了更加方便我自己,我将其Y轴范围修改如下:
| 数值范围 | 说明 |
|---|---|
| -239~0 | 上方 |
| 0 | 中间 |
| 0~239 | 下方 |
这样分布后我们就知道负数是上,正数是下,我们要让舵机尽量往中间(就是0的位置)移动。
实现的代码:
实现了X轴和Y轴距离中心的位置反馈
# 如果找到了至少一个blob
if blobs:
# 找到最大的blob
largest_blob = max(blobs, key=lambda b: b.pixels())
# 画框
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 计算相对于屏幕中心的X轴和Y轴的偏移量
x_offset = largest_blob.cx() - img.width() // 2
y_offset = largest_blob.cy() - img.height() // 2
# 屏幕显示位置信息和像素大小,包含正负号
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
img.draw_string_advanced(0,0,32,wz)
接下来我们来考虑一个问题:如何将Y轴的数值反馈给舵机让它按照我们设置的方向动作?
接下来了解一下我的想法,我们要让舵机往Y轴的中心 0 去动作。
当识别物体Y轴为-239 ~ 0时,我们让舵机向下,直到识别物体Y轴的数值为0;
当识别物体Y轴为0 ~ 239 时,我们让舵机向上,直到识别物体Y轴的数值为0;
现在这个Y轴就是舵机角度与目标方位的误差!我们要让误差尽量保持为0!
首先是考虑如何解决数值不对等问题。舵机的范围是 2.5 ~ 12.5,Y轴的范围是 -239 ~ +239 ,我们要将Y轴的数值压缩到 2.5 ~ 12.5 的范围。可以通过以下代码实现:
# DETECT_WIDTH = 640
# DETECT_HEIGHT = 480
# min_duty = 2.5 #最小占空比
# max_duty = 12.5 #最大占空比
## 将Y轴偏移数值转换为占空比的函数
def input_to_duty_cycle(input_min, input_max, input_value):
# 定义输入输出范围
# input_min = -(DETECT_HEIGHT // 2)
# input_max = (DETECT_HEIGHT // 2)
output_min = min_duty
output_max = max_duty
# 检查输入是否越界
if input_value < input_min or input_value > input_max:
raise ValueError(f"输入值必须在 {input_min} 和 {input_max} 之间")
# 计算线性映射公式
slope = (output_max - output_min) / (input_max - input_min)
output_value = output_min + (input_value - input_min) * slope
return output_value
现在解决了这个数值不对等问题,舵机的居中角度是 7.5,当识别物体在上方时,舵机的数值输出小于 7.5 ; 当识别物体在下方时,舵机的数值输出大于7.5;
完整代码:
import time, os, gc, sys, math,utime
from machine import PWM, FPIOA, Pin, UART
from media.sensor import *
from media.display import *
from media.media import *
from pid import PID
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
sensor = None
###############################舵机配置#####################################################
# 2.5 = -90度 7.5 = 0度 12.5 = 90度
min_duty = 2.5 #最小占空比
max_duty = 12.5 #最大占空比
mid_duty = 7.5 # 中间值,对应于0度
pwm_lr = None
# 配置排针引脚号12,芯片引脚号为47的排针复用为PWM通道3输出
pwm_io1 = FPIOA()
pwm_io1.set_function(47, FPIOA.PWM3)
# 初始化PWM参数
pwm_ud = PWM(3, 50, 50, enable=True) # 默认频率50Hz,占空比50% 3~12
# 配置排针引脚号32,芯片引脚号为46的排针复用为PWM通道2输出
pwm_io2 = FPIOA()
pwm_io2.set_function(46, FPIOA.PWM2)
# 初始化PWM参数
pwm_lr = PWM(2, 50, 50, enable=True) # 默认频率50Hz,占空比50% 2~13
pwm_lr.duty(7.5) #旋转到中间
pwm_ud.duty(7.7) #旋转到中间
##########################################################################################
## 将Y轴偏移数值转换为占空比的函数
def input_to_duty_cycle(input_min, input_max, input_value):
# 定义输入输出范围
# input_min = -(DETECT_HEIGHT // 2)
# input_max = (DETECT_HEIGHT // 2)
output_min = min_duty
output_max = max_duty
# 检查输入是否越界
if input_value < input_min or input_value > input_max:
raise ValueError(f"输入值必须在 {input_min} 和 {input_max} 之间")
# 计算线性映射公式
slope = (output_max - output_min) / (input_max - input_min)
output_value = output_min + (input_value - input_min) * slope
return output_value
try:
# 初始化摄像头
sensor = Sensor(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 传感器复位
sensor.reset()
# 开启镜像
sensor.set_hmirror(True)#False
# sensor vflip
sensor.set_vflip(True)#False True
# 设置图像一帧的大小
sensor.set_framesize(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 设置图像输出格式为彩色的RGB565
sensor.set_pixformat(Sensor.RGB565)
# 使用IDE显示图像
Display.init(Display.VIRT, width = DETECT_WIDTH, height = DETECT_HEIGHT, fps = 100)
# 初始化媒体管理器
MediaManager.init()
# 摄像头传感器开启运行
sensor.run()
# 定义要识别颜色的阈值,这里需要根据你的具体情况调整
# 你可以通过尝试不同的阈值来找到最适合你的物体颜色值
red_threshold = (0, 42, 17, 94, -6, 50)
while True:
# 拍摄一张图片
img = sensor.snapshot()
# 查找图像中满足红色阈值的区域
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200, merge=True)
# 如果找到了至少一个blob
if blobs:
# 找到最大的blob
largest_blob = max(blobs, key=lambda b: b.pixels())
# 画框
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 计算相对于屏幕中心的X轴和Y轴的偏移量
x_offset = largest_blob.cx() - img.width() // 2
y_offset = largest_blob.cy() - img.height() // 2
# 屏幕显示位置信息和像素大小,包含正负号
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
img.draw_string_advanced(0,0,32,wz)
duty_ud_value = input_to_duty_cycle(-(DETECT_HEIGHT // 2), (DETECT_HEIGHT // 2), y_offset)
print(duty_ud_value)
# 中心画十字
img.draw_cross(img.width() // 2, img.height() // 2, color=(0, 255, 0), size=10, thickness=3)
# IDE显示图片
Display.show_image(img)
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception {e}")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
if isinstance(pwm_lr, PWM):
pwm_lr.deinit()
# release media buffer
MediaManager.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
如果我们将摄像头固定在舵机上,舵机移动的时候,我们的摄像头也移动。那按照想法就是屏幕跟舵机一起动,这样就能够稳定的固定到中心,实现了识别瞄准功能。
将这个代码直接应用到舵机上的效果:
GIF动图(没有PID的直接控制)
PID自动控制
大家根据上面的舵机控制章节,应该是可以实现最简单的舵机追踪功能,但是大家会发现有不稳定或者抖动的现象,比如我举一些例子:
- 当识别目标快速运动时,舵机的运动速度不会跟着识别目标的速度而进行变化,一直保持一个速度;
- 超调现象。误差已经到0了,但是因为舵机的旋转惯性,(假设的,实际的舵机速度一直不变惯性很小)导致会超出0误差,比如-1 -> 0 -> 1,因为惯性从0到1了,又从 1 -> 0 -> -1,导致怎么都不能正常的误差为0,舵机一直抖。
这个时候我们就要了解一个最常用的控制算法:PID算法。
PID介绍
PID控制器,即比例-积分-微分控制器,是一种广泛应用于工业控制系统中的反馈回路控制器。它通过控制系统的偏差(设定值与实际值之间的差)来调节控制变量,使得系统达到或维持在一个预定的状态。PID控制器由三个基本控制动作组成:比例(Proportional)、积分(Integral) 和 微分(Derivative) ,下面详细介绍这三个部分:
比例(P)控制
比例控制的作用是根据设定值与实际值之间的误差(e),进行比例放大后作为控制输出。其数学表达式为:
其中,Kp 是比例增益,决定了比例控制的强度。比例控制的特点是动作快速直接,但通常会存在一个稳态误差,即系统稳定后,输出值与设定值之间仍会有一定的差距。
误差的说明,点击展开
根据设定值与实际值之间的误差(e),应该很好理解 ,我们之前的舵机控制章节就说明了误差的概念,尽可能的让误差为0。
实际值就是摄像头识别物体的方位;
设定值就是摄像头采集的图像中心;
我们要让图像中心接近物体方位。让它们的误差越来越小,直到为0。
稳态误差的说明,点击展开
即系统稳定后,输出值与设定值之间仍会有一定的差距。就是误差值明明是0了,但是实际上却是在1~2之间徘徊,就是到不了0。
积分(I)控制
积分控制的作用是对偏差进行积分运算,以消除稳态误差。积分作用考虑了误差的历史累积,其数学表达式为
你也可以这么看这个参数:I = Ki * e的历史累积
其中,Ki 是积分增益。积分控制能够消除稳态误差,但可能会引起系统的响应速度变慢,并且可能造成系统的超调和振荡。
超调和振荡的说明,点击展开
超调 意味着系统输出超过了设定值,比如你的舵机值设定范围是2.5~12.5% ,但是PID计算的结果超过了12.5,变成15?20?100?或者更高,这个是严重的问题;
振荡 则是指系统在设定值附近反复波动,就是猛过头了,反应过激,刹车不了。
微分(D)控制
微分控制的作用是根据误差变化的速率(即偏差的微分)来进行控制,以预测误差的未来趋势。微分作用的数学表达式为:
其中,Kd 是微分增益。微分控制有助于减少系统的超调和振荡,提高系统的动态性能,但它对噪声敏感,可能会放大控制信号中的噪声。
噪声的说明,点击展开
噪声就是干扰,我们用电机速度PID做一个例子,当前我们速度为0,我们设置目标速度为10,通过PID的计算,电机旋转速度会逐渐接近10,这个时候你去手动干预它,让电机不能转,这个就是干扰,你干扰了电机的运动,电机的速度变慢了,导致PID的误差在时间上一直越来越大,那么PID为了让电机速度更快接近目标,PID计算的值就越来越大,电机的旋转力度就越来越大,直到挣脱你的束缚。那对噪声敏感,表示的就是你干扰了一下,PID就崩溃了,对噪声产生过大的反应,导致控制输出不稳定。
PID控制器的基本形式
将上述三个控制作用结合起来,PID控制器的理论基本形式可以表示为:

其中 u(t) 是控制器的输出,e(t) 是在时间t时的偏差。通过PID我们就能够让舵机动作的更加快速,稳定的到达我们设置的目标位置。
PID公式转为代码
上面的原理部分大家看看就可以了,我们从实际应用入手。首先将以上PID数学公式转化为代码公式:
out = (Kp * p) + (Ki * i) + (Kd * d)
整理参数,参数分为静态参数和动态参数:
#静态参数
Kp = 0
Ki = 0
Kd = 0
#动态参数
i = 0 #积分I
e = 0 #当前误差
last_e = 0 #之前误差
max_out = 0 #最大输出
将代码公式一一拆分,得到下面的PID的计算函数:
def pid_calc(reference, feedback):#reference=目标位置 feedback=当前位置
last_e = e #更新之前的误差
e = reference - feedback #通过当前值和目标值计算获取新的误差
#计算比例P
p = e * Kp
#计算积分I
i += e * Ki
#计算微分D
d = (e - last_e) * Kd
#计算PID输出
out = p + i + d
#输出限制
if out > max_out:
out = max_out
elif out < -max_out:
out = -max_out
return out
注意,PID计算是要实时的,请确保PID的计算不会被阻塞太久;积分
I是累加的,必须是全局变量;
现在PID部分的代码基本完成了,接下来是最重要的如何使用PID。我将PID的代码给封装成为了一个库文件上传到K230里面。
class PID:
def __init__(self, kp, ki, kd, maxI, maxOut):
#静态参数
self.kp = kp
self.ki = ki
self.kd = kd
#动态参数
self.change_p = 0
self.change_i = 0
self.change_d = 0
self.max_change_i = maxI #积分限幅
self.maxOutput = maxOut #输出限幅
self.error_sum = 0 #当前误差
self.last_error = 0 #之前误差
def change_zero(self):#PID变化累计的参数清零
self.change_p = 0
self.change_i = 0
self.change_d = 0
def pid_calc(self, reference, feedback):#reference=目标位置 feedback=当前位置
self.last_error = self.error_sum
self.error_sum = reference - feedback #获取新的误差
#计算微分
dout = (self.error_sum - self.last_error) * self.kd
#计算比例
pout = self.error_sum * self.kp
#计算积分
self.change_i += self.error_sum * self.ki
#积分限幅
if self.change_i > self.max_change_i :
self.change_i = self.max_change_i
elif self.change_i < -self.max_change_i:
self.change_i = -self.max_change_i
#计算输出
self.output = pout + dout + self.change_i
#输出限幅
if self.output > self.maxOutput:
self.output = self.maxOutput
elif self.output < -self.maxOutput:
self.output = -self.maxOutput
return self.output
将上面的代码保存,并且对整个文件命名为 pid.py,完成后上传到K230的sdcard文件夹里面。
接下来是如何使用这个库。在我们的main.py代码中,引入该文件:
from pid import PID
然后创建 PID 对象,并对其静态参数进行设置:
lr_kp = 0.013
lr_ki = 0.0008
lr_kd = 0.016
lr_max_out = 12.5 #最大输出
pid_lr = PID(lr_kp, lr_ki, lr_kd, 10, lr_max_out) #创建左右电机的PID对象
ud_kp = 0.013
ud_ki = 0.00091
ud_kd = 0.02
ud_max_out = 12.5 #最大输出
pid_ud = PID(ud_kp, ud_ki, ud_kd, 10, ud_max_out) #创建上下电机的PID对象
创建 PID 对象后,应用到我们的舵机动作代码中,我将关键代码取出分析:
# 如果找到了至少一个目标色块
if blobs:
# 找到最大的目标色块
largest_blob = max(blobs, key=lambda b: b.pixels())
# 给目标色块画框标记出来
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在标记框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 计算目标色块相对于屏幕中心的X轴和Y轴的偏移量
x_offset = largest_blob.cx() - img.width() // 2
y_offset = largest_blob.cy() - img.height() // 2
# 在屏幕显示目标色块的位置信息和像素大小,包含正负号
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
# 显示字符串
img.draw_string_advanced(0,0,32,wz)
# 根据中心偏移量计算PWM的PID
# 0为目标值,x_offset表示当前设定值
pid_lr_value = pid_lr.pid_calc(0,x_offset)
pid_ud_value = pid_ud.pid_calc(0,y_offset)
''' 关键点一 '''
# 将PID值转换为舵机的范围并且输出实际的占空比
duty_lr_value = input_to_duty_cycle(pid_lr_value)
duty_ud_value = input_to_duty_cycle(pid_ud_value)
''' 关键点二 '''
# 根据计算后的占空比控制舵机动作
#pwm_lr.duty(duty_lr_value)
#pwm_ud.duty(duty_ud_value)
lr表示左右旋转的舵机,ud表示上下旋转的舵机。
大家可以在上面的代码中看到 关键点一 和 关键点二 的注释,在关键点一的位置可以通过print输出一下PID计算后的值pid_lr_value;在关键点二的位置输出实际占空比值duty_lr_value。
print(f"pid_lr_value={pid_lr_value}, pid_ud_value={pid_ud_value}\r\n")
print(f"duty_lr_value={duty_lr_value}, duty_ud_value={duty_ud_value}\r\n")
PID调参
当大家取消舵机动作的注释并下载执行后,会发现这个PID的效果并不理想,有的反应慢,有的反应快,有的基本没有动。这个是因为我们没有调好PID。
那如何调整好PID的参数呢?
在实际应用中,需要对PID控制器的参数 Kp \ Ki \ Kd 进行调整,以达到理想的控制效果。这通常通过以下步骤进行:
- 先设定比例增益
Kp:使系统响应快速,但可能会出现稳态误差。 - 调整积分增益
Ki:消除稳态误差,但要注意超调和振荡。 - 最后调整微分增益
Kd:改善系统的动态行为,减少超调和振荡。
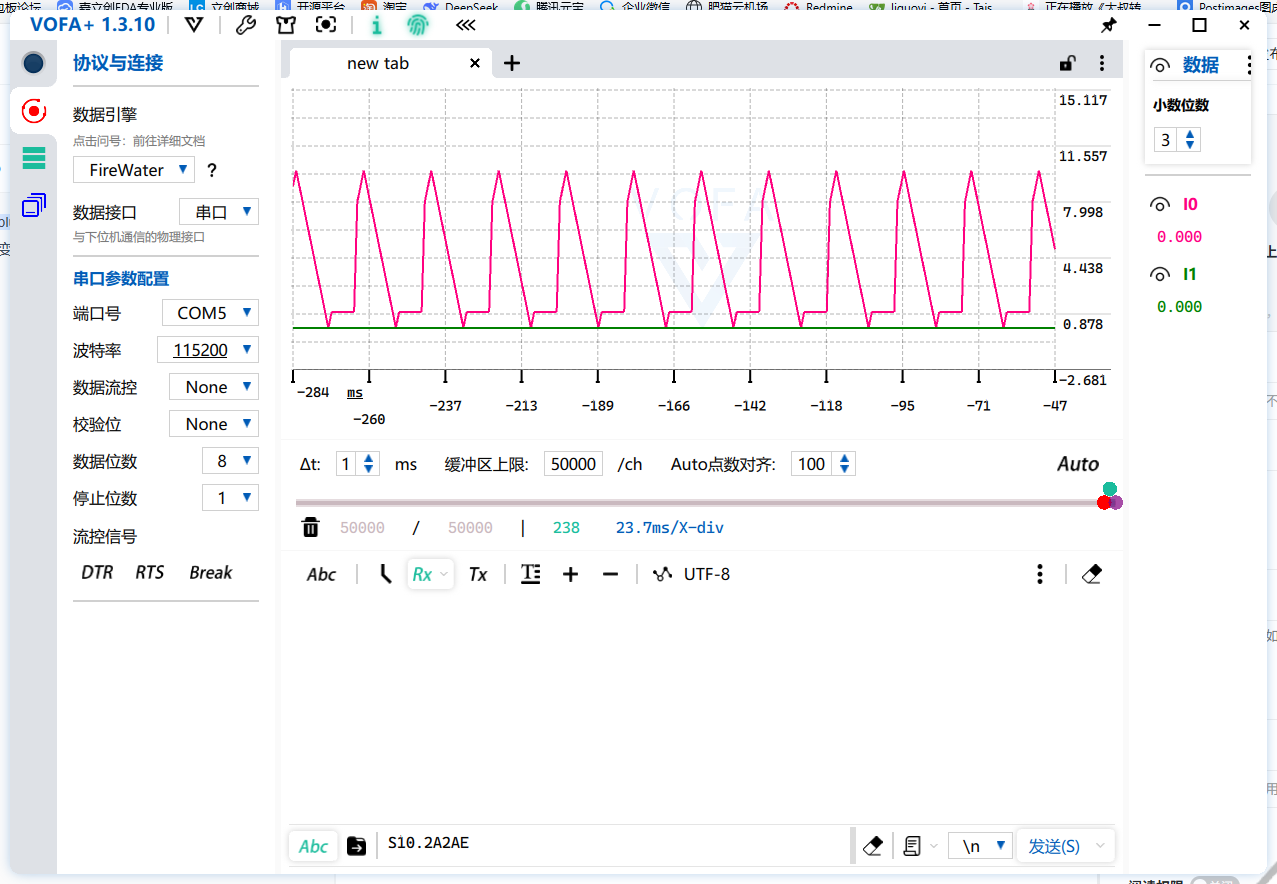
我调试 PID 是通过串口 和 Vofa+工具。Vofa+是一款上位机工具,我个人认为目前对这个项目来说最大的作用是显示出数据波形变化。
 |
|---|
目前我还不知道K230的单步调试手段,所以只能盲调PID:设置一个P\I\D值,然后看PID输出的数据曲线和目标数据曲线的差别。如果误差很大,则重新设置一个P\I\D值继续调到误差小为止。
当然,如果有时间和精力,也可以自己写一套通过串口调整参数的代码。
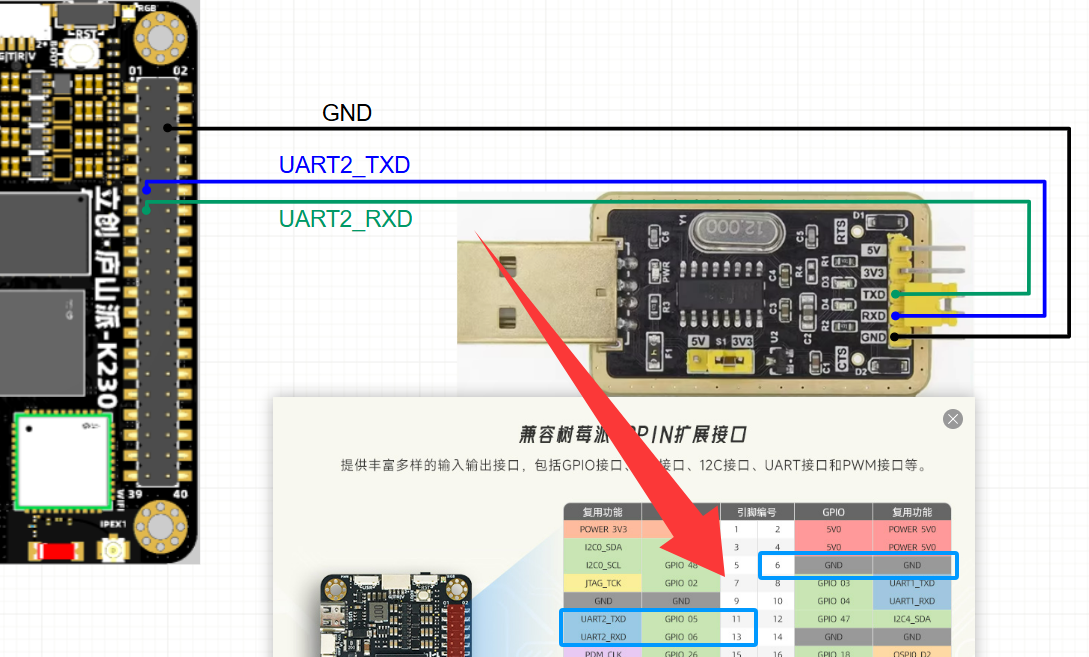
硬件连接
图中的这个带金边的模块是CH340的USB转串口模块,是很常用的东西了。这个因为没有找到更好的实物图,就找了这个,现在这个图模块上的RXD和TXD接到一起了,实际连接的时候是不要短接在一起的, 切记。
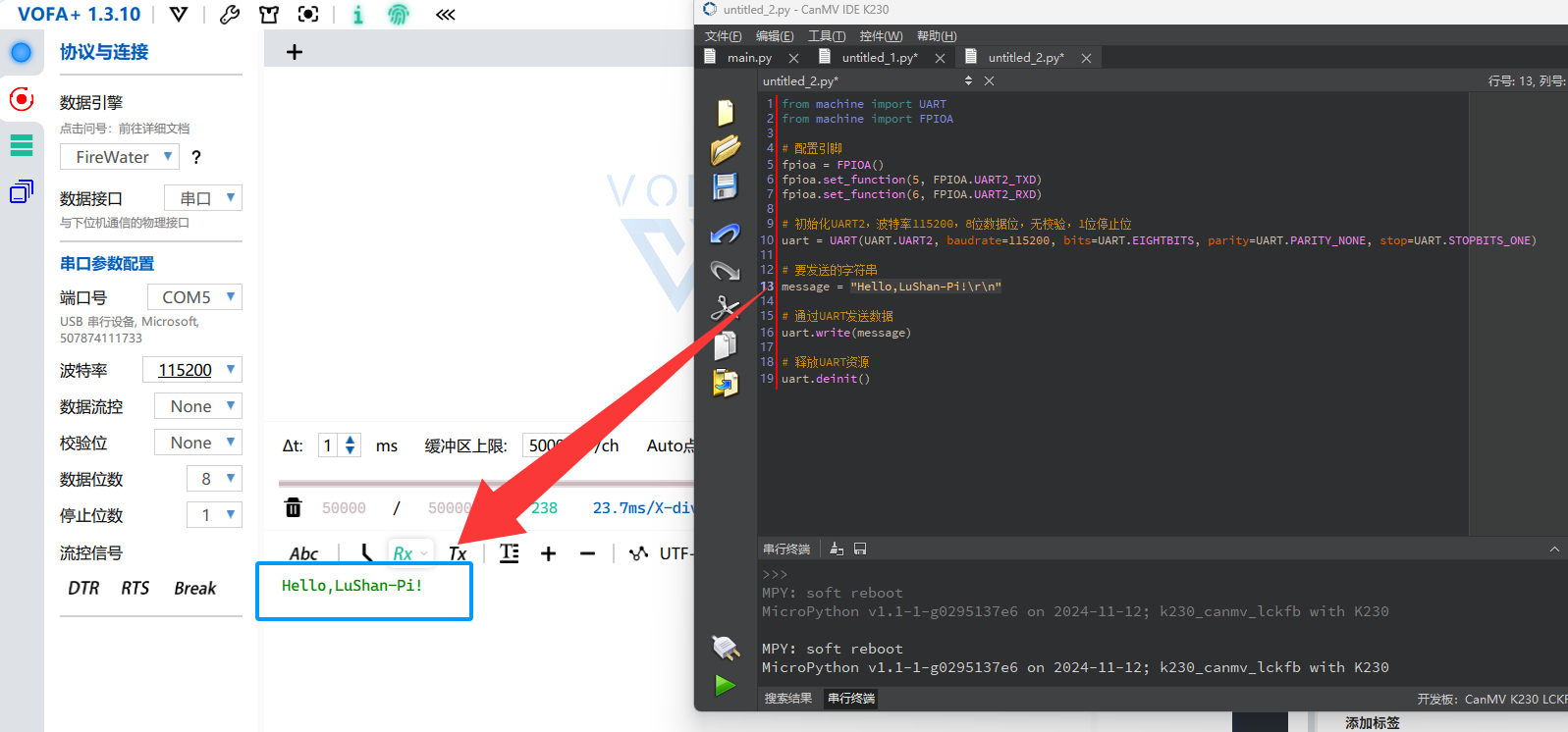
我们通过下面的代码测试一下k230的串口发送功能 和 vofa+的使用:
K230的串口知识和使用方法,参考立创开发板的庐山派串口章节教程
from machine import UART
from machine import FPIOA
# 配置引脚
fpioa = FPIOA()
fpioa.set_function(5, FPIOA.UART2_TXD)
fpioa.set_function(6, FPIOA.UART2_RXD)
# 初始化UART2,波特率115200,8位数据位,无校验,1位停止位
uart = UART(UART.UART2, baudrate=115200, bits=UART.EIGHTBITS, parity=UART.PARITY_NONE, stop=UART.STOPBITS_ONE)
# 要发送的字符串
message = "Hello,LuShan-Pi!\r\n"
# 通过UART发送数据
uart.write(message)
# 释放UART资源
uart.deinit()
效果图:
Vofa+的使用
这里就介绍Vofa+的数据接收协议 和 波形的显示方法。
接收协议
比较常用的是 FireWater协议,其协议格式如下:
<any>:ch0,ch1,ch2,...,chN\n
参数说明:
| 元素 | 描述 |
|---|---|
| <any> | 表示数据名称,可以自定义 |
| : | 必须加英文冒号,不然解析不了数据,就不会显示在Vofa+上。 |
| ch0~chN | ch表示通道数据,0~N表示是第几个通道的数据。比如我要发送两个浮点数据(float)到vofa+显示波形,分别是1.2 和 21.4。那么就可以写为 float:1.2,21.4\n,这样就可以显示两个数据。 |
| , | 表示每一个数据之间的间隔 |
| \n | 结尾必须加\n,不然解析不了数据,就不会显示在Vofa+上。 |
示例:
float:1.2,21.4\n
temp:25.3\n
sensor:0.5,1.7,3.2\n
关键注意事项
! 1. 冒号不能省略:数据名称后必须立即跟英文冒号(:)
! 2. 逗号分隔数据:多个数值必须用英文逗号(,)分隔
! 3. 结尾必须有\n:换行符是数据结束的强制标记
! 4. 通道顺序:数据值的顺序对应通道索引(第一个值=ch0,第二个值=ch1,以此类推)
 |
|---|
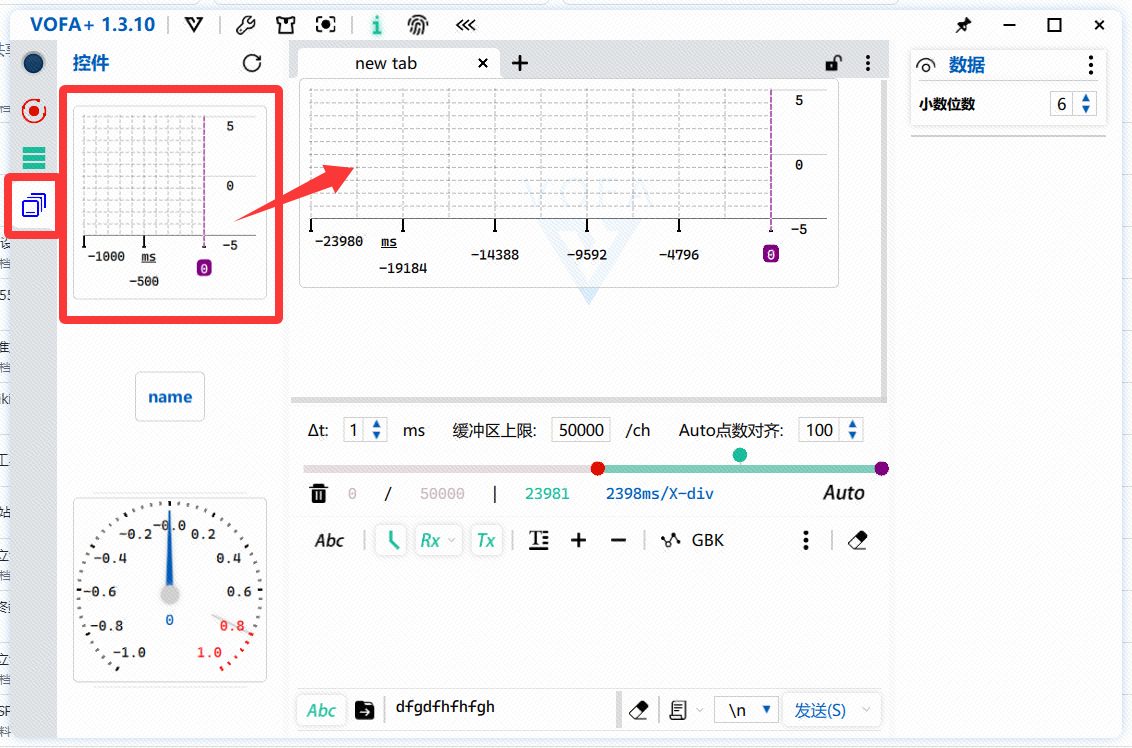
波形显示
在 Vofa+ 的左侧边栏找控件,将波形图控件拉出到放置区即可。
 |
|---|
我们可以通过 Vofa+ 本身自己带的 Demo 数据测试能不能显示出波形。
不过 Vofa+ 接收到数据后,还不能马上显示在波形图上,还需要我们配置波形的输入数据。
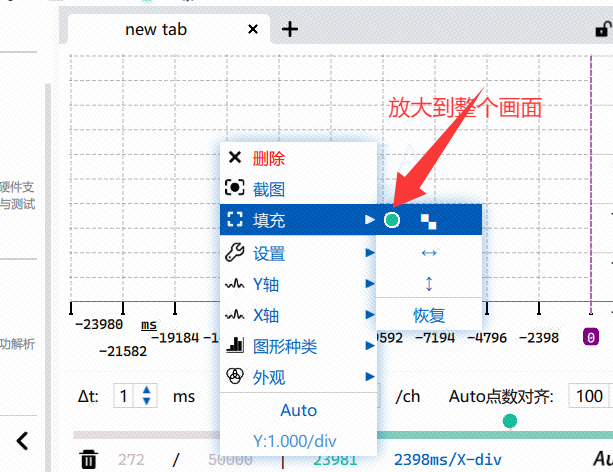 |
 |
|---|---|
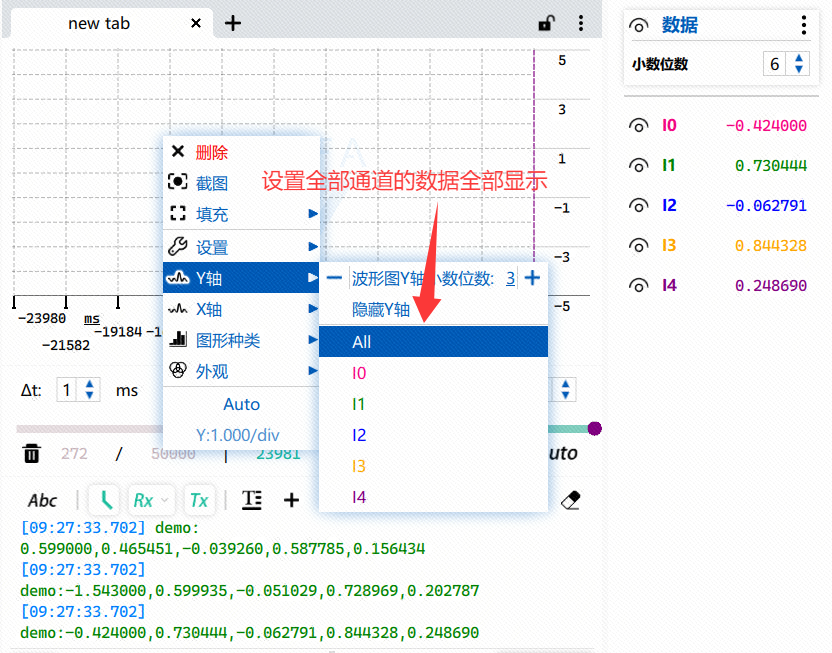
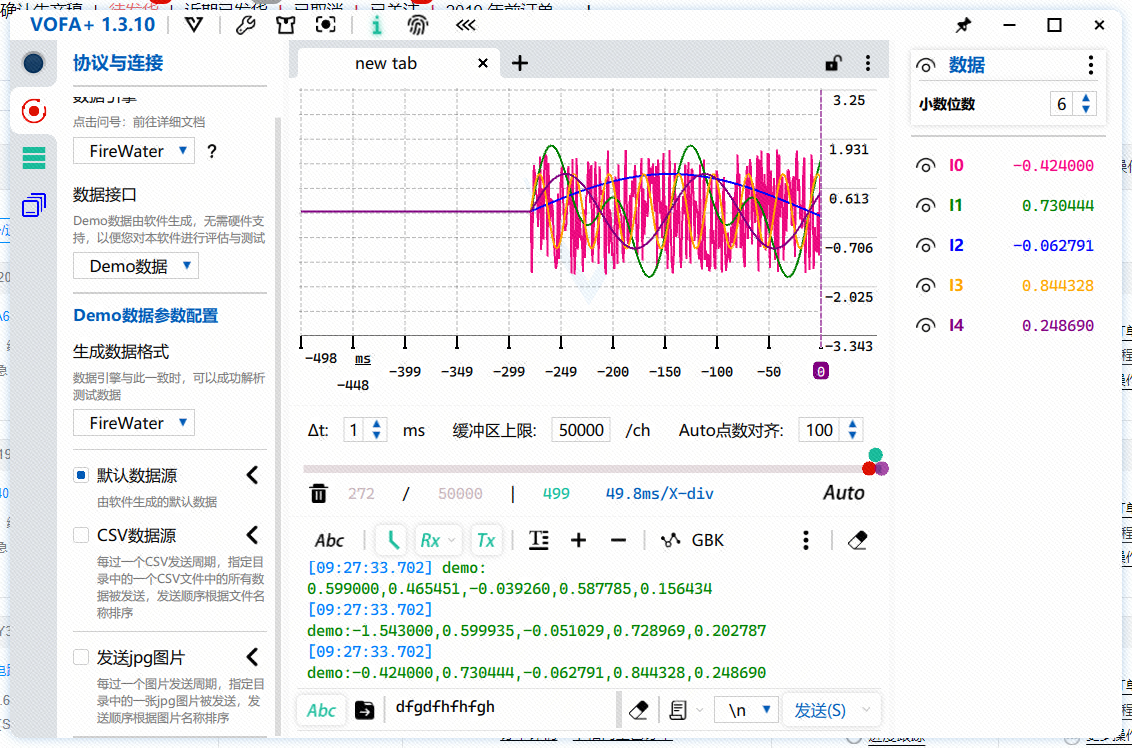
不出意外的话,你应该会显示下面的画面:
5个通道的数据,不断更新就可以得到波形。
 |
|---|
现在各位就可以自行调试你的PID啦。
加PID后的效果及代码
如果你发现你往左,而舵机往右,说明极性反了,让参数变成负数即可。
如果你发现响应速度慢,那就加大 Kp 值。
如果你发现,图像的中心跟目标的中心始终有误差,那你就加大 Ki 值;如果舵机一直在目标位置反复横跳抖动,那你就减小 Ki 值。
如果你想实现了PID的基本快速追踪,想让它更快,那就调整 Kd 值。
这个是我的调试结果:
实现这个效果的代码:
import time, os, gc, sys, math,utime
from machine import PWM, FPIOA, Pin, UART
from media.sensor import *
from media.display import *
from media.media import *
from pid import PID
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
sensor = None
###############################舵机配置#####################################################
# 2.5 = -90度 7.5 = 0度 12.5 = 90度
min_duty = 2.5 #最小占空比
max_duty = 12.5 #最大占空比
mid_duty = 7.5 # 中间值,对应于0度
pwm_lr = None
# 配置排针引脚号12,芯片引脚号为47的排针复用为PWM通道3输出
pwm_io1 = FPIOA()
pwm_io1.set_function(47, FPIOA.PWM3)
# 初始化PWM参数
pwm_ud = PWM(3, 50, 50, enable=True) # 默认频率50Hz,占空比50% 3~12
# 配置排针引脚号32,芯片引脚号为46的排针复用为PWM通道2输出
pwm_io2 = FPIOA()
pwm_io2.set_function(46, FPIOA.PWM2)
# 初始化PWM参数
pwm_lr = PWM(2, 50, 50, enable=True) # 默认频率50Hz,占空比50% 2~13
pwm_lr.duty(7.5) #旋转到中间
pwm_ud.duty(4) #旋转到中间
##########################################################################################
###############################PID配置#####################################################
lr_kp = 0.17
lr_ki = 0.016
lr_kd = 0
lr_max_out = DETECT_WIDTH//2 #PID最大输出
pid_lr = PID(lr_kp, lr_ki, lr_kd, lr_max_out, lr_max_out)
ud_kp = 0.17
ud_ki = 0.016
ud_kd = 0
ud_max_out = DETECT_HEIGHT//2 #PID最大输出
pid_ud = PID(ud_kp, ud_ki, ud_kd, ud_max_out, ud_max_out)
##########################################################################################
## 将Y轴偏移数值转换为占空比的函数
def input_to_duty_cycle(input_min, input_max, input_value):
# 定义输入输出范围
# input_min = -(DETECT_HEIGHT // 2)
# input_max = (DETECT_HEIGHT // 2)
output_min = min_duty
output_max = max_duty
# 检查输入是否越界
if input_value < input_min or input_value > input_max:
raise ValueError(f"输入值必须在 {input_min} 和 {input_max} 之间")
# 计算线性映射公式
slope = (output_max - output_min) / (input_max - input_min)
output_value = output_min + (input_value - input_min) * slope
return output_value
try:
# 初始化摄像头
sensor = Sensor(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 传感器复位
sensor.reset()
# 开启镜像
sensor.set_hmirror(True)#False
# sensor vflip
sensor.set_vflip(True)#False True
# 设置图像一帧的大小
sensor.set_framesize(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 设置图像输出格式为彩色的RGB565
sensor.set_pixformat(Sensor.RGB565)
# 使用IDE显示图像
Display.init(Display.VIRT, width = DETECT_WIDTH, height = DETECT_HEIGHT, fps = 100)
# 初始化媒体管理器
MediaManager.init()
# 摄像头传感器开启运行
sensor.run()
# 定义要识别颜色的阈值,这里需要根据你的具体情况调整
# 你可以通过尝试不同的阈值来找到最适合你的物体颜色值
red_threshold = (0, 42, 17, 94, -6, 50)
while True:
# 拍摄一张图片
img = sensor.snapshot()
# 查找图像中满足红色阈值的区域
blobs = img.find_blobs([red_threshold], pixels_threshold=200, area_threshold=200, merge=True)
# 如果找到了至少一个blob
if blobs:
# 找到最大的blob
largest_blob = max(blobs, key=lambda b: b.pixels())
# 画框
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 计算相对于屏幕中心的X轴和Y轴的偏移量
x_offset = largest_blob.cx() - img.width() // 2
y_offset = largest_blob.cy() - img.height() // 2
# 屏幕显示位置信息和像素大小,包含正负号
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
img.draw_string_advanced(0,0,32,wz)
# 根据中心偏移量计算PWM的PID
# 0为目标值,x_offset表示当前设定值
pid_lr_value = pid_lr.pid_calc(0,x_offset)
pid_ud_value = pid_ud.pid_calc(0,y_offset)
''' 关键点一 '''
# 将PID值转换为舵机的范围并且输出实际的占空比
duty_lr_value = input_to_duty_cycle(-(DETECT_WIDTH // 2), (DETECT_WIDTH // 2), pid_lr_value)
duty_ud_value = input_to_duty_cycle(-(DETECT_HEIGHT // 2), (DETECT_HEIGHT // 2), pid_ud_value)
print(f"pid_lr_value={pid_lr_value}, pid_ud_value={pid_ud_value}\r\n")
print(f"duty_lr_value={duty_lr_value}, duty_ud_value={duty_ud_value}\r\n")
''' 关键点二 '''
# 根据计算后的占空比控制舵机动作
pwm_lr.duty(duty_lr_value)
pwm_ud.duty(duty_ud_value)
# 中心画十字
img.draw_cross(img.width() // 2, img.height() // 2, color=(0, 255, 0), size=10, thickness=3)
# IDE显示图片
Display.show_image(img)
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception '{e}'")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
if isinstance(pwm_lr, PWM):
pwm_lr.deinit()
# release media buffer
MediaManager.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
数据滤波
相信大家在调试的时候,会发现识别物体的中心位置跳变非常频繁,识别的物体明明根本没有动,但是因为识别代码的问题,识别的位置一直在变动,有时候变动小,有时候变动大。这个变动会影响到我们的PID计算,导致舵机不稳定:识别到物体后,明明舵机已经指向识别物体的中心了,但是舵机还是会有一些动作调整,导致一直动,都不停的。
那为了解决这个问题,我们就可以使用滤波的方式,将数据跳变不大的时候,过滤掉。最简单的滤波就是采集多次然后取平均值,这个平均值就是滤波后的结果。
如果你的PID没有调好,那也可以直接用滤波,应该也可以实现一个比较不错的效果。
这里我用一个比较常用的滤波算法:一阶低通滤波算法。
我将代码封装成为了一个库文件,将下面代码保存并命名为 filter.py,完成后上传到K230的sdcard文件夹里面。
#一阶低通滤波器
class LowPassFilter:
def __init__(self, alpha):
self.alpha = alpha # 滤波器的系数,0 < alpha <= 1
self.last_output = None
def update(self, value):
if self.last_output is None:
# 初始化滤波器的输出
self.last_output = value
else:
# 更新滤波器的输出
self.last_output = self.alpha * value + (1 - self.alpha) * self.last_output
return self.last_output
接下来是介绍如何使用这个滤波算法,首先使用前先导入库:
from filter import LowPassFilter
然后初始化滤波参数:
#滤波
alpha = 0.1 # 滤波器系数,您可以根据需要调整这个值
lr_filter = LowPassFilter(alpha) # 左右舵机滤波器
接着在关键代码中调用API函数 .update,比如我采集的位置数据是 pid_lr_value,我要对其滤波则输入pid_lr_value,API.update返回的数值就是滤波后的数值:
# 对目标物体的中心位置进行滤波
filter_lr_value = lr_filter.update(x_offset)
filter_ud_value = ud_filter.update(y_offset)
实现效果:
完整代码:
import time, os, gc, sys, math,utime
from machine import PWM, FPIOA, Pin, UART
from media.sensor import *
from media.display import *
from media.media import *
from pid import PID
from filter import LowPassFilter
DETECT_WIDTH = 640
DETECT_HEIGHT = 480
sensor = None
###############################舵机配置#####################################################
# 2.5 = -90度 7.5 = 0度 12.5 = 90度
min_duty = 2.5 #最小占空比
max_duty = 12.5 #最大占空比
mid_duty = 7.5 # 中间值,对应于0度
pwm_lr = None
# 配置排针引脚号12,芯片引脚号为47的排针复用为PWM通道3输出
pwm_io1 = FPIOA()
pwm_io1.set_function(47, FPIOA.PWM3)
# 初始化PWM参数
pwm_ud = PWM(3, 50, 50, enable=True) # 默认频率50Hz,占空比50% 3~12
# 配置排针引脚号32,芯片引脚号为46的排针复用为PWM通道2输出
pwm_io2 = FPIOA()
pwm_io2.set_function(46, FPIOA.PWM2)
# 初始化PWM参数
pwm_lr = PWM(2, 50, 50, enable=True) # 默认频率50Hz,占空比50% 2~13
pwm_lr.duty(7.5) #旋转到中间
pwm_ud.duty(7.7) #旋转到中间
##########################################################################################
###############################PID配置#####################################################
lr_kp = 0.17
lr_ki = 0.016
lr_kd = 0
lr_max_out = DETECT_WIDTH//2 #PID最大输出
pid_lr = PID(lr_kp, lr_ki, lr_kd, lr_max_out, lr_max_out)
ud_kp = 0.17
ud_ki = 0.016
ud_kd = 0
ud_max_out = DETECT_HEIGHT//2 #PID最大输出
pid_ud = PID(ud_kp, ud_ki, ud_kd, ud_max_out, ud_max_out)
##########################################################################################
###############################一阶低通滤波器配置############################################
alpha = 0.1 # 滤波器系数,您可以根据需要调整这个值
lr_filter = LowPassFilter(alpha) # 左右舵机滤波器
ud_filter = LowPassFilter(alpha) # 上下舵机滤波器
##########################################################################################
## 将Y轴偏移数值转换为占空比的函数
def input_to_duty_cycle(input_min, input_max, input_value):
# 定义输入输出范围
# input_min = -(DETECT_HEIGHT // 2)
# input_max = (DETECT_HEIGHT // 2)
output_min = min_duty
output_max = max_duty
# 检查输入是否越界
if input_value < input_min or input_value > input_max:
raise ValueError(f"输入值必须在 {input_min} 和 {input_max} 之间")
# 计算线性映射公式
slope = (output_max - output_min) / (input_max - input_min)
output_value = output_min + (input_value - input_min) * slope
return output_value
try:
# 初始化摄像头
sensor = Sensor(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 传感器复位
sensor.reset()
# 开启镜像
sensor.set_hmirror(True)#False
# sensor vflip
sensor.set_vflip(True)#False True
# 设置图像一帧的大小
sensor.set_framesize(width = DETECT_WIDTH, height = DETECT_HEIGHT)
# 设置图像输出格式为彩色的RGB565
sensor.set_pixformat(Sensor.RGB565)
# 使用IDE显示图像
Display.init(Display.VIRT, width = DETECT_WIDTH, height = DETECT_HEIGHT, fps = 100)
# 初始化媒体管理器
MediaManager.init()
# 摄像头传感器开启运行
sensor.run()
# 定义要识别颜色的阈值,这里需要根据你的具体情况调整
# 你可以通过尝试不同的阈值来找到最适合你的物体颜色值
red_threshold = (0, 42, 17, 94, -6, 50)
while True:
# 拍摄一张图片
img = sensor.snapshot()
# 查找图像中满足红色阈值的区域
blobs = img.find_blobs([red_threshold], pixels_threshold=400, area_threshold=400, merge=True)
# 如果找到了至少一个blob
if blobs:
# 找到最大的blob
largest_blob = max(blobs, key=lambda b: b.pixels())
# 画框
img.draw_rectangle(largest_blob.rect(), color=(255, 0, 0))
# 在框内画十字,标记中心点
img.draw_cross(largest_blob.cx(), largest_blob.cy(), color=(255, 0, 0))
# 计算相对于屏幕中心的X轴和Y轴的偏移量
x_offset = largest_blob.cx() - img.width() // 2
y_offset = largest_blob.cy() - img.height() // 2
# 屏幕显示位置信息和像素大小,包含正负号
wz = "x={}, y={}, w={}, h={}".format(x_offset, y_offset, largest_blob.w(), largest_blob.h())
img.draw_string_advanced(0,0,32,wz)
# 对目标物体的中心位置进行滤波
filter_lr_value = lr_filter.update(x_offset)
filter_ud_value = ud_filter.update(y_offset)
# 根据中心偏移量计算PWM的PID
# 0为目标值,x_offset表示当前设定值
pid_lr_value = pid_lr.pid_calc(0,filter_lr_value)
pid_ud_value = pid_ud.pid_calc(0,filter_ud_value)
# 将PID值转换为舵机的范围并且输出实际的占空比
duty_lr_value = input_to_duty_cycle(-(DETECT_WIDTH // 2), (DETECT_WIDTH // 2), pid_lr_value)
duty_ud_value = input_to_duty_cycle(-(DETECT_HEIGHT // 2), (DETECT_HEIGHT // 2), pid_ud_value)
# 根据计算后的占空比控制舵机动作
pwm_lr.duty(duty_lr_value)
pwm_ud.duty(duty_ud_value)
# 中心画十字
img.draw_cross(img.width() // 2, img.height() // 2, color=(0, 255, 0), size=10, thickness=3)
# IDE显示图片
Display.show_image(img)
except KeyboardInterrupt as e:
print(f"user stop")
except BaseException as e:
print(f"Exception '{e}'")
finally:
# sensor stop run
if isinstance(sensor, Sensor):
sensor.stop()
# deinit display
Display.deinit()
if isinstance(pwm_lr, PWM):
pwm_lr.deinit()
# release media buffer
MediaManager.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)